Emergency Response
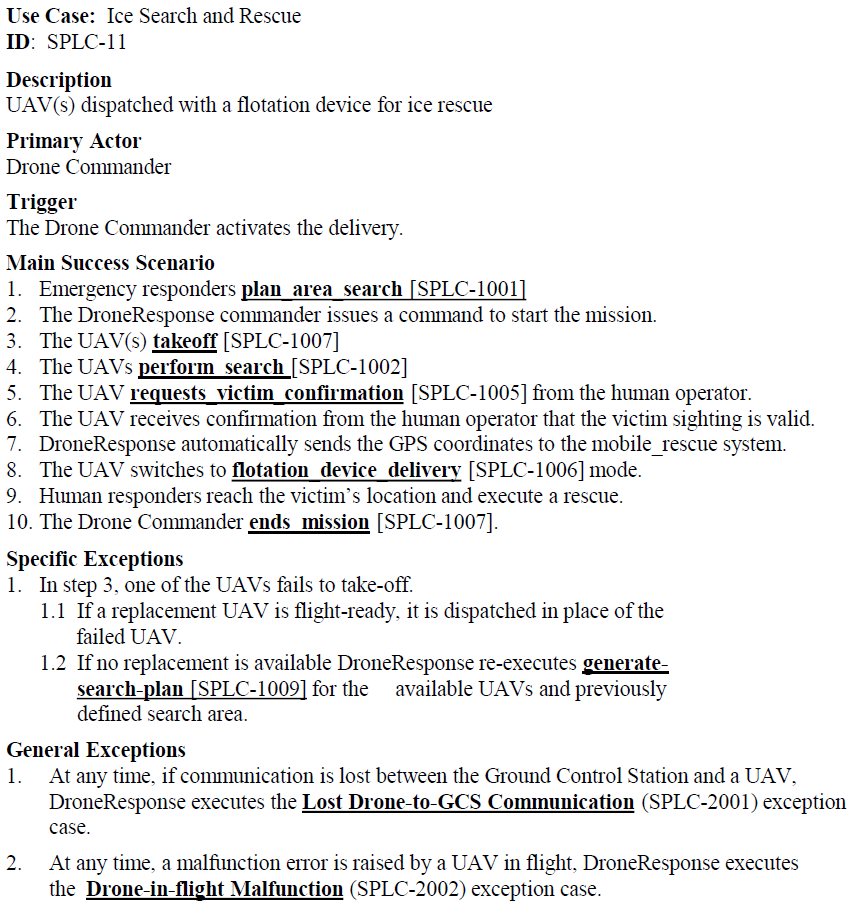
Small Unmanned Aerial Systems (sUAS) are increasingly used to support diverse missions such as search-and-rescue operations, earthquake relief, bridge inspections, fire and accident surveillance, and medical supply delivery. Many of these missions, especially those related to emergency response, can benefit from, or heavily rely on the simultaneous deployment of multiple sUAS -- each charged with an individual task. For example, in a coast guard rescue operation, several sUAS could perform the search, whilst one or more could be on standby to deliver a flotation device, and yet another could provide birds-eye surveillance of the scene.
A flexible system
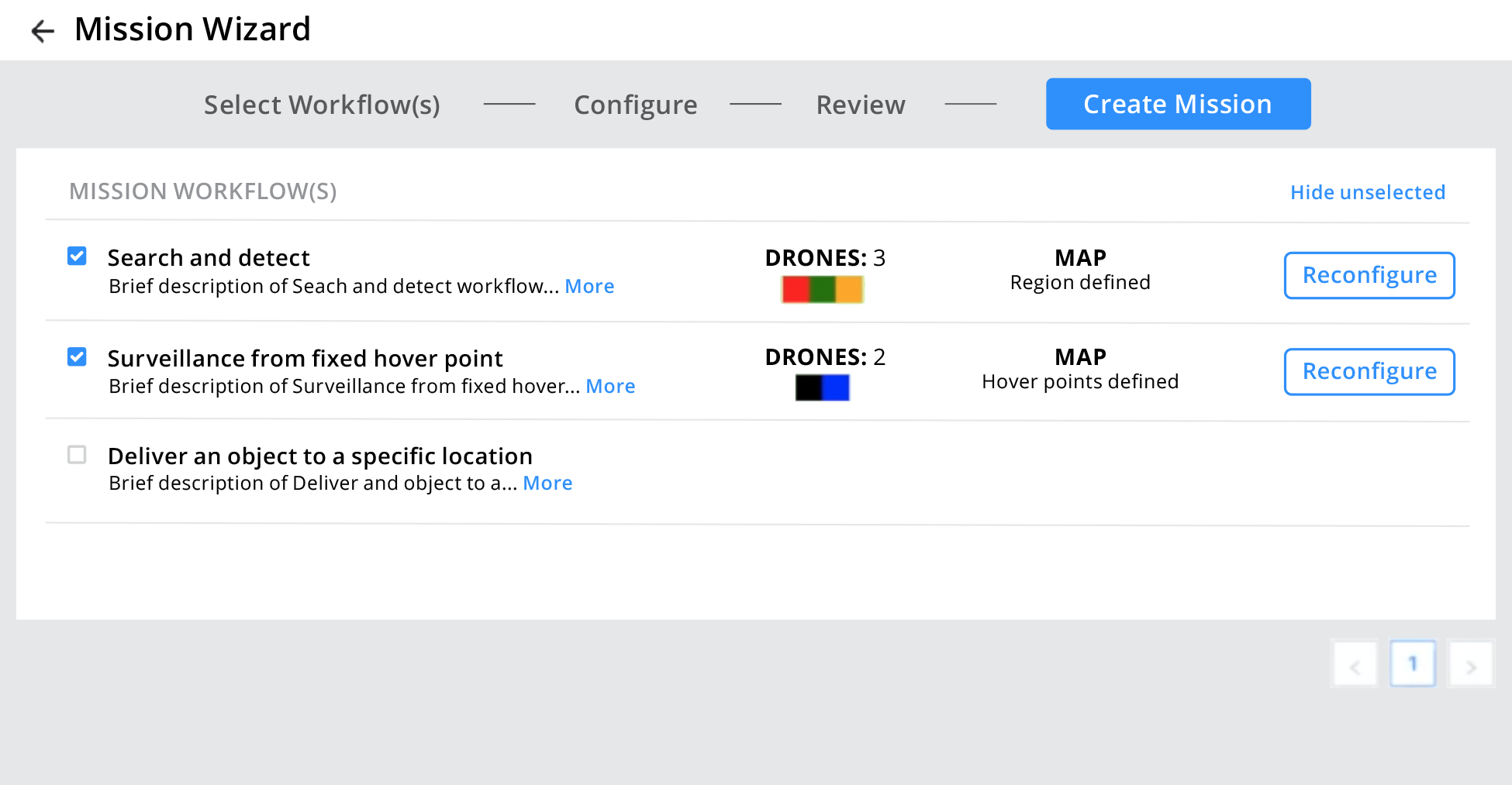
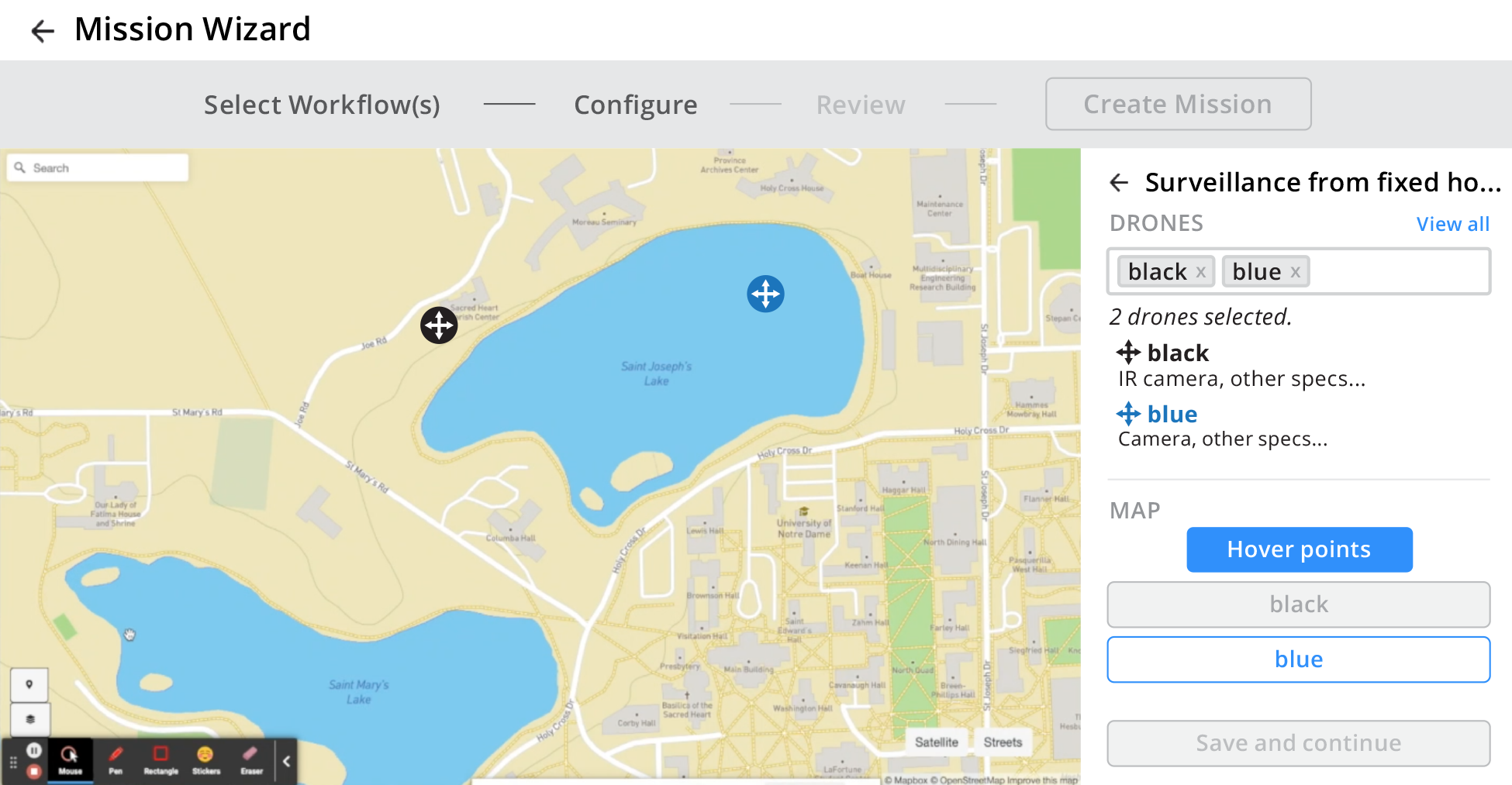
To address these challenges, we have developed a multi-sUAS mission management and control system,
which takes a Software Product Line (SPL) approach to support and configure diverse emergency missions.
SPLs represent software-intensive systems in which individual products are typically generated from domain-level
assets by selecting a set of alternative and optional features (variabilities) and composing them into
an individual product on top of a set of common base features (commonalities). This makes it easy to deploy DroneResponse
on varied missions, and rapidly program new capabilities into the system.

While such missions typically share a set of common tasks, they also exhibit unique characteristics. Certain tasks, such as launching an sUAS, obstacle and collision avoidance, or planning search routes, are common across many, or even all of the mission deployments; while other tasks, such as collecting water samples, or tracking a moving victim in a river, are unique to a specific type of mission. Efficiently and effectively managing such variabilities is a non-trivial challenge that must take into consideration the context and sequencing of events, while simultaneously addressing safety concerns. Furthermore, given the time-criticality of emergency missions, the overall mission plan, as well as each sUAS' behavior must be configured quickly prior to launch, and mission specifications then pushed to relevant microservices, mobile units, and to individual sUAS.
Funding
- $1,186,394, NSF CPS:Medium:Interactive Human-Drone Partnerships in Emergency Response Scenarios, (Jane Cleland-Huang, Walter Scheirer)